モータードライバー(TA7267BP)
トイラジコンのDCモーターを動かす為にTOSHIBA製モータードライバーを使ってみました!
これ一つでモーターを正転・逆転・ストップ・ブレーキまで簡単に制御出来る様になりました!
1. モータードライバーとは
モータ駆動部とコントロール部はおのおの独立の電源端子を持っているため、サーボをかけることも可能です。
1.1 フル・ブリッジ・ドライバとは
Hブリッジドライバとも書かれます。
「ドライバ」は駆動を意味し、弱い信号から大きな電力を制御する物に使われます。
「ブリッジ」は架け橋の意味で、モーターに供給する電力の架け橋として機能します
「フル」と来れば「ハーフ」もあります、
フルブリッジドライバは図1左の様にトランジスタ4個を用いる事で電流をON・OFF、また電流の流れる方向も制御出来ます。

「TA7267BP」モータードライバーの性能は表1、端子図は図2に示す通りです。
| 項目 | 単位 | 定格 |
| 電源電圧最大 | Vcc(max) | 25V |
| 電源電圧動作 | Vcc(opr) | 18V |
| ピーク出力電流 | Io(PEAK) | 3.0A |
| 平均出力電流 | Io(AVE) | 1.0A |
| 許容損失 | PD | 12.5W |
| 動作温度 | Topr | -30~75℃ |
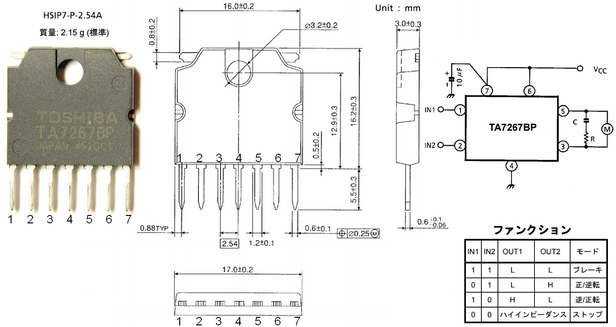
図2:寸法及び端子図
1.3 スナバ回路
図2右上の「TA7267BP」モータードライバー接続例に、③~⑤間に書かれているCとRは、スナバ回路(サージキラーやスパークキラーやCRアブソーバーとも言う)の一種です。
モーター等のコイルを持つインダクタ負荷は電流の流れを一定にしようとする性質があります。その為電気回路をON・OFFスイッチした際にサージ電圧と言う逆起電圧が発生しスイッチ部品に定格以上の電圧が掛かり故障することがあります。
スイッチ部品の故障を防ぐためにサージ電圧を吸収為にスナバ回路が使われます。
今回の実験ではスナバ回路は省略していますが、参考にスナバ回路で使用するコンデンサ容量(μF)と抵抗値(Ω)の算出方法は以下の通りです。
1.3.1 C(コンデンサ)
通常耐電圧の高いメタライズドフィルムコンデンサが使われます。
フィルムコンデンサはインダクタ負荷に並列に接続し、負荷から発生した逆起電圧を吸収します。
〇フィルムコンデンサの静電容量(C)
負荷回路の定常時の電流値(I)を用いて以下の計算式から算定する事が出来ます。
I=定常時の負荷電流(A)
1.3.2 R(抵抗)
抵抗値は使用するインダクタ負荷の抵抗値、もしくは10~470Ω程度の抵抗を使用します。
2. 実験回路
図2端子図を参考にブレッドボード上に実験回路を図3の通り作ってみました。
左のスライドスイッチがIN1で右のスライドスイッチがIN2です。
スイッチを右にスライドするとHighになり左にスライドするとLow(実験なのでプルダウン抵抗 は省略しました)になります。
IN1とIN2へのH,L入力信号の組み合わせにおけるモーターの動作は、図2右下ファンクション表の通りです。

図3:モータードライバーの実験回路
3. 接続
前回の記事 で作ったトイラジコンの電源端子からワニ口クリップを使って図3ブレッドボードの+(下赤ライン)、-(上青ライン)に図4の様に接続します。※この時スライドスイッチは2つともLow(左)にしておくと安全です。
次にモータードライバーの3番ピンに赤クリップ→モーターの+(赤線)、5番ピンに黒クリップ→モーターの-(黒線)に接続し準備OKです!
接続後の全体写真は図5の通りです。

図4:モータードライバー回路とトイラジコンを接続

図5:接続後の全体
4. 実験!
モータードライバーが正常に動けばどちらか片方のスライドスイッチをONすればタイヤが前か後ろに回ります!
と言う事でIN1に接続されたスライドスイッチをLowからHigh(IN2はLow)にすると前進しました
逆にIN2に接続されたスライドスイッチをLowからHigh(IN1はLow)にすると前進しました

図6:IN1(Low)、IN2(Low)では止まってます。

図7:IN1(High)、IN2(Low)で前進!
2. まとめ
ここまで来れば一安心です。
残すはフロントステアリングをただのDCモーターからサーボモーターに交換したいのと、コントローラーをどうしようか迷います