ラジコンをArduinoで自動運転!その5(Qiコネクター)

1.必要なもの
Qiコネクターで配線する際には表1の部品が必要で、専用工具に関しては有った方が作業が捗ります!
| 部品名 | 必要数 |
| Qiコネクタ(3ピン) | 11個 |
| Qiコネクタ用ピン(メス) | 33本 |
| 3本線ケーブル | 20cm |
| 精密圧着ペンチ(PA-09) | 1本 |
| ワイヤーストリッパー(No.3500E-2) | 1本 |
1.1 部品
1.1.1 Qiコネクタ3ピン(メス用)とQiコネクタ用ピン(メス)
先日大阪恵美須町に行った時に買ってきました!
このコネクターはピンヘッダーと一緒に使い重宝しています。

図1:Qiコネクタ(メス)
1.1.2 Qiコネクタ3ピン(オス用)とQiコネクタ用ピン(オス)
Qiコネクタのメスとオスをつなげれば、ケーブルを途中で中継する事が出来ます。
今回は使用しません。

図2:Qiコネクタ(オス)
1.1.3 3本ケーブル
Qiコネクタとセットで使います。
3本の線がくっ付いているので配線が多くなる時にスッキリとして使い勝手が良いです。

図3:3本ケーブル
1.2 工具
工具に関しては圧着ペンチが無くても、細いラジオペンチで時間を掛ければ止める事は出来ますが強く引っ張るとすぐに抜けてしまい心配です
またワイヤーストリッパーが無くても、カッターで線材の被覆を剥く事は出来ますが中の導線を傷つけてしまう可能性が高く危ないです。
そんな心配も危険も大幅に減少する専用工具は、出番は少ないのですが有ると良い仕事が早く出来て気分的に良いです。



図6-1:必要な長さに線材を切ります

図6-2:作業がし易い様に線材を90°折り曲げます

図6-3:ワイヤーストリッパーで3mm位線材の被覆線を剥きます
※剥きすぎるとピン内に導線が入り込みピンヘッダー接続時に邪魔にるので注意が必要です。

図6-4:Qiコネクタ用ピン(オス)を精密圧着ペンチで圧着します
※ピンには取り付ける向きが有り、線材の切断面を上、白線を左に見た時、端子の折り曲げる部分が手前に来るように取り付けます。これをしないとQiコネクタに正しい順番で取り付け出来ません。(1本取り付け向きを失敗しました )
)
)※ピン1つにつき2回圧着しますが圧着する力加減を被覆線の所は優しめに、導線の所は強めに固定すると綺麗に圧着出来ます。

図6-5:Qiコネクタ3ピン(2.54mmピッチ)に図6-4のピンを挿しこみます
※図6-4で正しい向きにピンを取り付けていれば図6-5の様にQiコネクタの△部に白線が来て、尚且つQiコネクタの爪面にピンの折り返し部が向いているはずです。

図6-6:爪が引っ掛かる位置まで差し込めば完成です!
※図6-4の圧着でピンが曲がってしまった場合は上手く差し込めなくなってしまうので、そんな時はラジオペンチで形を修正して直します。
2.2 基板に取り付け
図6-1~6-6の要領で図7の通り4個作りました!
作ったQiコネクタ付きケーブルは図8の通りピンヘッダーに簡単に接続できます

図7:4つ完成!(なんだかんだ1時間近く掛かりました)
)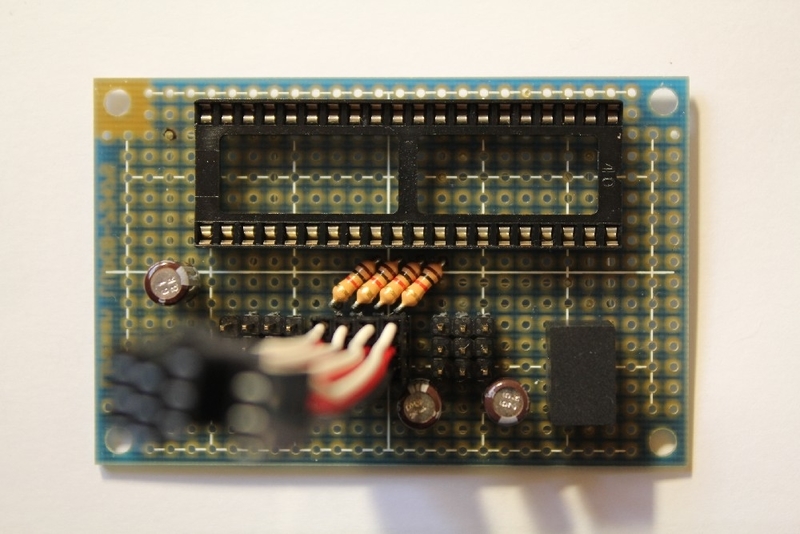
図8:作ったQiコネクタ付きケーブルをピンヘッダーに装着!
3. まとめ
ようやくユニバーサル基板の下準備が完了しました!
地味にラジコンの自動運転化は進んでいます
励みになりますのでよければクリック下さい(^o^)/