servo.write関数
servo.write関数はサーボモーターのアームの角度を指定してその向きに動作させる事ができます。
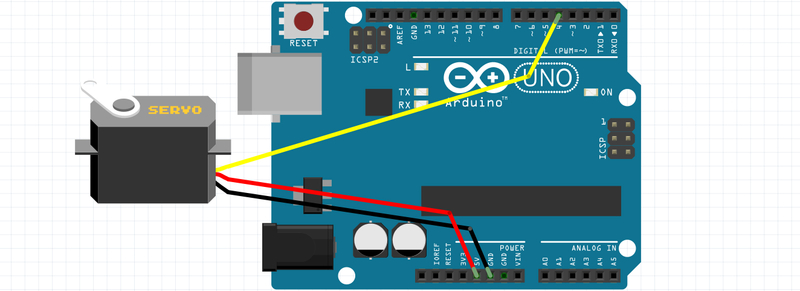

#include <Servo.h> Servo A; void setup() { A.attach(4, 500, 2400); //4番ピンを出力ピンにする } void loop() { for (int i = 0; i < 180; i++) {//サーボの角度を0~180°迄1°づつ増加させる A.write(i); //4番ピンにサーボ制御信号を出力 delay(20); //20ms待つ } for (int i = 180; i >= 0; i--){//サーボの角度を180~0°迄1°づつ減少させる A.write(i); //4番ピンにサーボ制御信号を出力 delay(20); //20ms待つ } }

図1:プログラム例
servo.write(angle)