■Display Functions
PID_v1.hライブラリのDisplay Functions である各種関数は、一度構築されたPIDコントローラに現在設定されている各種パラメータの設定値を返します。
■使用例
Arduino IDEで使用するDisplay Functionsの使用例は以下の通りです。
試しにこのプログラムをArduino UNOで実行すると、PID関数でユーザー定義変数(今回はmyPID)にPID制御に必要な変数とパラメータを設定します。
setupでSetMode関数を使用し、デフォルトの「MANUAL」から「AUTOMATIC」モードに変更します。
Display Functionsの各種関数から取得した現在PIDコントローラーに設定されているパラメータをPCのシリアルモニタ上に出力します。
3番ピンで発生したPWM信号を直結された2番ピンで測定し、その結果から3番ピンの出力を、設定したDuty比70.6%(180)に近づく様にPIDアルゴリズムを含むCompute関数で求め出力します。
また上記と合わせて、現在の入力値(input)と、出力値(output)が図1の様にPCのシリアルモニタ上に出力されます。

/*NOBのArduino日記!_PID制御!DisplayFunctions編_20170412*/ #include <PID_v1.h> double Setpoint, Input, Output; PID myPID(&Input, &Output, &Setpoint, 0.04, 0.04, 0.04, DIRECT); //初期値設定 // PWMのD比測定 volatile float Duty; volatile unsigned long UpNew, UpOld, DownNew, DownOld; void SUB() { if (digitalRead(2) == LOW) { DownOld = DownNew; DownNew = micros(); Duty = ((DownNew - UpNew) * 1000) / ((UpNew - UpOld)) * 0.1; } else { UpOld = UpNew; UpNew = micros(); Duty = ((DownNew - UpOld) * 1000) / (UpNew - UpOld) * 0.1; } } void setup() { pinMode(3, OUTPUT); pinMode(2, INPUT_PULLUP); //3ピン出力2ピン入力設定 attachInterrupt(0, SUB, CHANGE); Serial.begin(9600); Setpoint = 180;//目標値設定 myPID.SetMode(AUTOMATIC);//PID関数を実行 Serial.print("Kp="); Serial.print(myPID.GetKp()); //PID関数のパラメータを出力 Serial.print(",Ki="); Serial.print(myPID.GetKi()); Serial.print(",Kd="); Serial.print(myPID.GetKd()); Serial.print(",Mode="); Serial.print(myPID.GetMode()); Serial.print(",Direction="); Serial.println(myPID.GetDirection()); } void loop() { Input = map(Duty, 0, 100, 0, 255); //2ピン入力値取得 myPID.Compute(); analogWrite(3, Output); Serial.print("Input="); Serial.print(Input); Serial.print(",Output="); Serial.println(Output); delay(100); }

図1:プログラム例
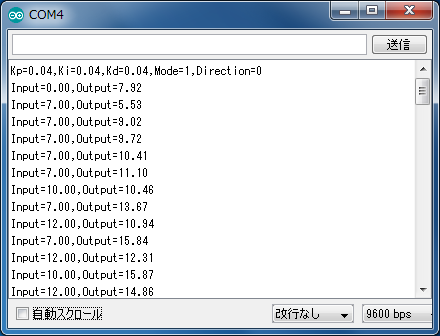
図2:プログラム実行結果
■構文・パラメータ・戻り値
取得可能なパラメータは表1に示す5種類です。これら関数は表示目的に便利です。
| 構文 | 内容 |
| GetKp() | Kp値を返します |
| GetKi() | Ki値を返します |
| GetKd() | Kd値を返します |
| GetMode() | 0(MANUAL)または 1(AUTOMATIC) |
| GetDirection() | 0(DIRECT)または 1(REVERSE) |
※これら関数にパラメータは有りません
励みになりますのでよければクリック下さい(^o^)/